Accurate modeling and simulation are essential for the design and validation of autonomous navigation algorithms. However, in agricultural applications, this task is particularly challenging due to the need for precise representation of tyre–ground or track–ground interactions.
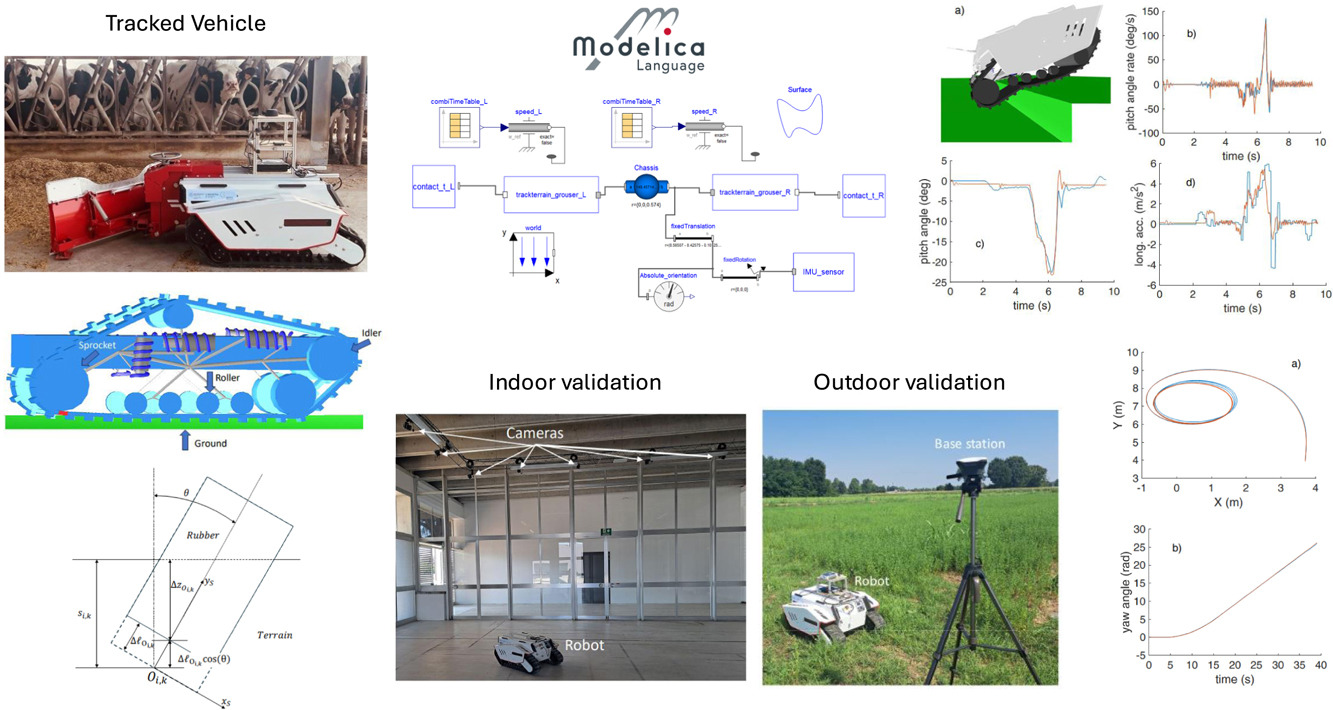
This work aims to develop high-fidelity robot models, including detailed terrain representations, using an object-oriented, multi-physics modeling language such as Modelica. In parallel, it explores the development of computationally efficient yet accurate models using physics-informed neural networks.
Finally, the integration of models from both approaches with autonomous navigation systems—whether implemented in pure C++ or within a ROS2 framework—is also addressed.
For further details refer to the paper “Object-oriented modelling of a tracked vehicle for agricultural applications“.